


No âmbito de:

Instituições promotoras:





1) Resumo das realizações
O projeto 1 no âmbito do programa BABEN visa a investigação de novas soluções tecnológicas para a avaliação e formação do controlo postural visando a deteção precoce do risco de quedas e fragilidade em pessoas idosas, e a formação ou exercício de equilíbrio para prevenir os riscos de queda. Soluções tecnológicas que facilitem a manutenção e recuperação da capacidade funcional (equilíbrio, em particular) dos idosos pré-frágeis e frágeis.
Os objetivos finais deste projeto são, por um lado, a conceção e fabrico de um novo dispositivo para a avaliação do controlo postural e a sua validação técnica com sistemas "gold standard" num laboratório de biomecânica (esta validação será efectuada através do projeto 2 do programa integrado BABEN).
Partindo de uma versão básica ou protótipo do sistema EQUIMETRIX, a TECNALIA conseguiu o projeto e fabricação de uma versão evoluída (ver Figura 1) que integra:
- Um sensor vestível para capturar o movimento do tronco, que é usado em combinação com um padrão de referência visual colocado no chão.
- Uma plataforma para medir a distribuição da pressão plantar. Uma plataforma com um tamanho grande (1x1m) que permite estudar o equilíbrio durante uma resposta em degrau.
- Uma unidade de processamento para a estimativa do deslocamento relativo entre o MDL e o BDS e o cálculo do "Índice de Estabilidade" em tempo real.
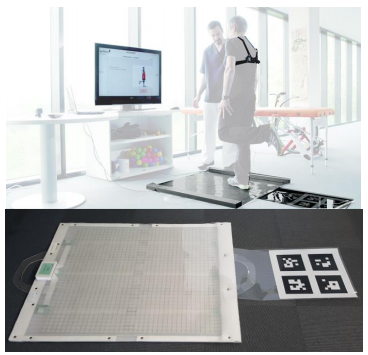
Figura 1 - Protótipo EQUIMETRIX desenvolvido
Esta versão do sistema EQUIMETRIX incorpora os seguintes resultados e melhorias:
- Integração no sistema da plataforma baropodométrica de fabricação própria e de maiores dimensões à utilizada anteriormente. Plataforma flexível, de peso reduzido, fácil integração e custo de fabricação reduzido em comparação com o uso de uma plataforma comercial.
- Obter um valor mais fiável para o índice de estabilidade graças à utilização de marcadores ArUco em conjunto com o sensor de visão, o que facilita a identificação da posição da pessoa que transporta o sensor de uma forma mais rápida e precisa.
Outra conquista até à data foi a adaptação do protótipo e do software de aquisição, para que este possa ser utilizado pela LABIOMEP no projeto 2, com o objetivo de validar tecnicamente a solução EQUIMETRIX desenvolvida comparando-a com equipamentos "gold standard" disponíveis no seu laboratório de biomecânica. A TECNALIA e a LABIOMEP definiram conjuntamente o protocolo de testes e comparações a efectuar nesta análise. E neste ponto de partida a TECNALIA adaptou o software para facilitar a aquisição de dados e preparou e enviou um protótipo do EQUIMETRIX para o LABIOMEP. No momento da redacção do presente relatório, já foi efectuada uma série de medições e comparações. Como próximos passos, após a conclusão do estudo comparativo que está a ser realizado pela LABIOEMP no âmbito do projeto 2, a análise dos resultados deste estudo comparativo está ainda pendente para identificar as melhorias necessárias a implementar no protótipo EQUIMETRIX.
A secção seguinte apresenta em pormenor os resultados obtidos até à data.
2. Detalhe dos resultados obtidos em relação a cada um dos seguintes aspectos e objetivos e marcos propostos
A tabela a seguir resume os objetivos e marcos associados propostos no projeto e seu estado ou grau de realização na data de conclusão deste relatório:
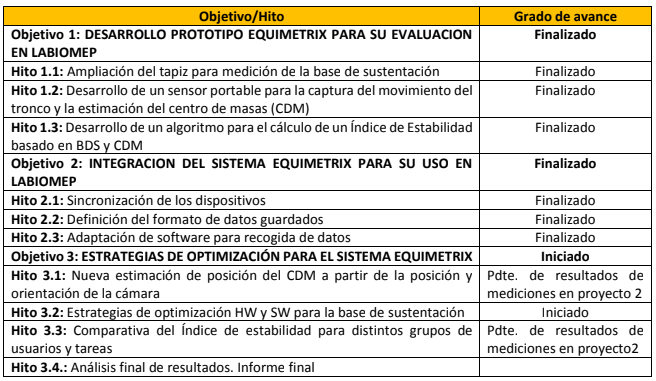
Os resultados e marcos completados até a data deste relatório são apresentados mais detalhadamente abaixo, focando nos Objetivos do Projeto 1 e 2.
2.1 Objetivo 1: DESENVOLVIMENTO DO PROTOTIPO DE EQUIMETRIX PARA A AVALIAÇÃO NO LABIOMEP
As pessoas podem usar diferentes estratégias de controle postural. Há pelo menos 3 estratégias: estratégias de tornozelo, estratégia de quadril, ou estratégia de passo.
- No uso da estratégia do tornozelo, a parte superior e inferior do corpo movem-se na mesma direção ou em fase entre si. Como a quantidade de força que pode ser gerada pelos músculos ao redor da articulação do tornozelo é relativamente pequena, esta estratégia é geralmente usada para controlar o rolo quando em pé ou quando a amplitude de movimento do rolo é muito pequena. Esta estratégia de tornozelo também é usada no nível subconsciente para restaurar o equilíbrio após um pequeno empurrão.
- Ao contrário da estratégia do tornozelo, a estratégia do quadril envolve a ativação dos músculos maiores do anca. Esta estratégia é utilizada quando o centro de massa deve recuar mais rapidamente na base de apoio.
- A estratégia de controlo postural final é a resposta por etapas. Esta estratégia é dada quando o centro de massa é mostrado além de um limite de estabilidade (por exemplo, levantamento da base). O corpo, nesta situação, deve buscar uma nova base de sustentação para evitar uma possível queda e dar pelo menos um passo na direção da perda de equilíbrio.
O dispositivo EQUIMETRIX deve ser melhorado para que possa analisar várias situações posturais que irão desencadear estratégias de tornozelo, anca ou passo. É importante ser capaz de medir todo o processo de recuperação, particularmente neste último caso (step response). Da mesma forma, durante tarefas antecipadas que testam a atualização de saldos, o usuário pode ter que dar um passo para alcançar um determinado centro de localização de massa. Portanto, é necessário um tapete sensorizado grande o suficiente para capturar também a localização do pé que se moveu. No protótipo inicial isto não foi possível.
Com o foco do dispositivo EQUIMETRIX (tapete sensor mais um sensor portátil), avaliar a estabilidade de um paciente usando essa estratégia de passo requer um tapete de tamanho adequado com o comprimento de um passo (ver H1.1).
Marco 1.1: Expansão da tapeçaria para medição da base do elevador desde o tamanho atual (0,45x0,3 cm2, ver figura 2 à esquerda) até um tamanho maior constituído por 6 unidades (ver figura 2dcha).
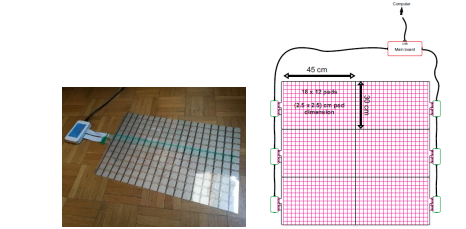
Figura 2 - esquerda un "pad" (0,45x0,3 m) com 216 sensores. Direita: Desenho do Flexipad composto por seis "pads" com um tamanho total de 0,9x0,9 m e 1296 sensores.
No projeto 1 do programa Baben desenhamos e produzimos os módulos eletrónicos que permitem medir os dados de cada um dos 6 blocos (Figura 3). Um dos módulos eletrónicos é o "master", e é responsável por agregar todos os dados, formatá-los e enviá-los via conexão USB para um computador principal.
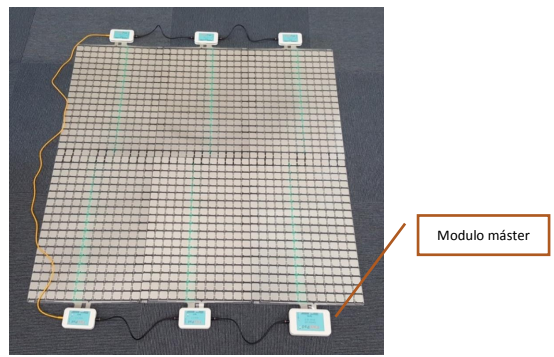
Figura 3 - Primeira versão do Flexipad com 6 pads e 6 módulos eletrónicos
Para serem utilizáveis num ambiente real, os sensores e módulos electrónicos foram protegidos para (1) evitar danos e (2) facilitar o seu movimento (ver Figura 4).
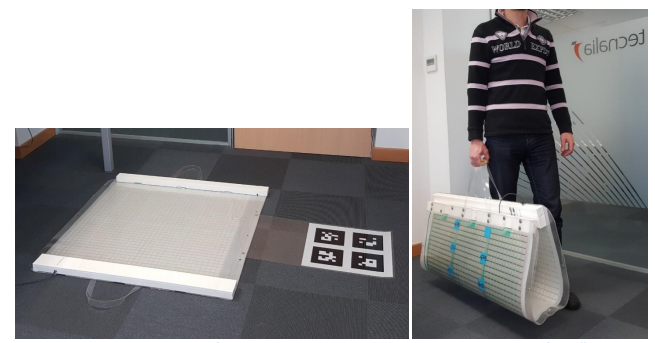
Figura 4 - esquerda. Primeira versão do sistema Flexipad completo. O sistema é projetado para facilitar o manuseio.
Esta primeira versão do Flexipad foi melhorada em vários aspetos:
- O design eletrónico foi alterado para ter apenas um módulo eletrónico centralizado (Figura 5 - Erros! A origem da referência não é encontrada.). Os seis "pads" estão ligadas através de cabos planos. Desta forma, foi possível eliminar as peças laterais de proteção.
- Além disso, após vários testes, foi possível substituir as duas películas de PVC flexível de 2 mm que protegem a camada sensível dos "pads" por duas camadas de película de PVC flexível de 1 mm. Isto resultou numa redução significativa do peso global.
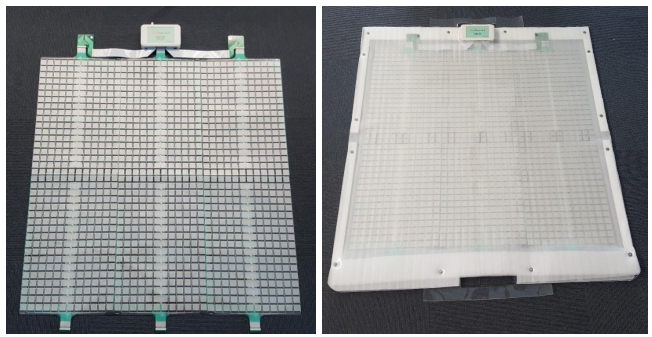
Figura 5 - Novo projeto Flexipad eletrónico com um único módulo centralizado.
No final, conseguimos reduzir o peso total do Flexipad de 7,85Kg para 2,60Kg (redução de 67%), oferecendo uma solução leve e fácil de transportar.
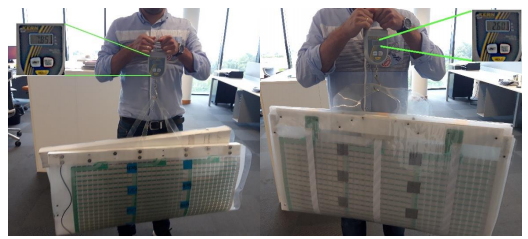
Figura 6 - esquerda. Primeira versão (7.85Kg). (Direita) segunda versão Flexipad (2.60Kg)
Marco histórico 1.2: Desenvolvimento de um sensor portátil para captura de movimento do tronco e estimativa do centro de massa (MDL).
A pessoa carrega um sistema baseado em visão (uma câmera) na altura do tronco. Esta câmera captura a imagem de um marcador visual conhecido colocado no chão. A posição e orientação da câmera são estimadas usando bibliotecas livres para processamento de imagens (openCV). Aplica-se um modelo para estimar o centro de massa do utilizador a partir da posição e orientação da câmera.
Para o protótipo selecionou-se uma câmera USB standard, embora a lente tenha sido substituída para obter um ângulo de visão maior. A câmera captura imagens num padrão visual no chão (Figura 7 - ). É um padrão de referência visual baseado em marcadores ArUco, comentando que é um marcador passivo, que não necessita de potência para o seu funcionamento, o que é uma vantagem sobre outros marcadores que poderiam ser LED. A geração deste marcador é simples, pois utiliza um banco de dados público que é acessado no OpenCV (módulo "Aruco"). Uma vez acessados, podem ser impressos no tamanho mais apropriado para cada aplicação.
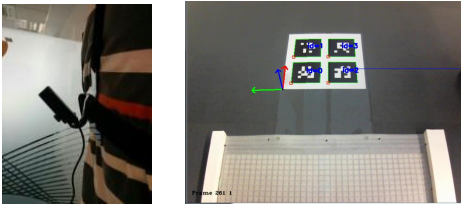
Figura 7 - Sensor óptico colocado no tronco (esquerda) para estimar a posição e orientação do tronco a partir de imagens do padrão visual (direita).
O arnês é usado para fixar e posicionar a câmera na parte de trás do tronco de uma pessoa. Devido à sua facilidade de aplicação e remoção, a capacidade de ajustar a vários tamanhos de tronco e a possibilidade de ter um grau de liberdade para orientar de forma otimizada a câmera, decidiu-se usar um produto comercial, como o arnês peitoral para a câmera GoPro (Figura 8).

Figura 8 - Arnês para fixação da câmera ao tronco
Trabalho em andamento: conseguir a transmissão de dados sem fio entre o sensor de visão (câmera) e o software protótipo Equimetrix.
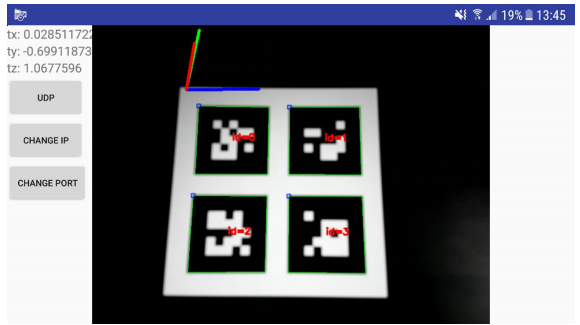
A ideia é substituir a câmara USB por um telemóvel (Figura 9). O smartphone é responsável por (1) tirar imagens do padrão visual, (2) estimar a posição e orientação do telefone, e (3) enviar UDP (via wifi) a posição e orientação 3D do telefone.
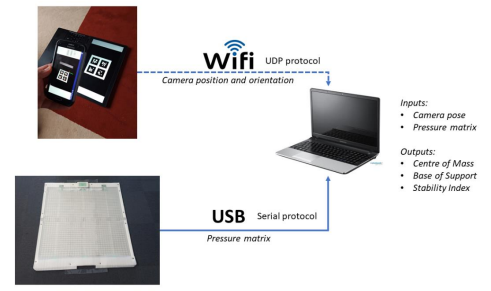
Criamos uma aplicação móvel Android (Figura 10) que se encarrega de :
- criar um cliente UDP,
- estimar a posição da câmera a partir do fluxo de vídeo do padrão visual,
- enviar uma mensagem UDP para o servidor (computador)
Marco 1.3: Desenvolvimento de um algoritmo para o cálculo de um índice de estabilidade baseado na BDS e no MDL. Assume-se que a estabilidade postural está associada a algumas das seguintes características:
1) manutenção do MDL (ou MDL estendido) sobre o BDS (Hof, Gazendam e Sinke 2005), 2) ou o movimento e trajetória suaves do MDL e do MDL,
3) ou a capacidade de repor a posição do MDL ou do PDC numa posição óptima.
Outros estudos sustentam a tese de que conceitos/métodos como o "tempo de contato" que analisam a posição relativa entre o MDL e a posição dos pés (como o BDS) fornecem mais informações e são altamente confiáveis quando comparados aos métodos tradicionais baseados apenas em medições MDL ou PDC. Podemos citar, neste sentido, as comparações de..:
- Forth (Forth, Metter, e Paloski 2007) fez uma comparação entre:
o EQscore (baseado na posição do MDL) como o parâmetro mais utilizado como estimador da estabilidade ou Com Time-to-Contact (TTC) que se baseia na posição do MDL e na velocidade relativa ao BDS. A partir dessa comparação, concluíram que a TTC permite uma melhor diferenciação entre os movimentos que podem representar um risco para a estabilidade postural.
- (Wheat, Haddad e Scaife 2012) : As medidas de TTC foram geralmente mais confiáveis do que as medidas de estabilidade postural tradicionais, especialmente quando oram analisados menos testes e com menor duração.
Com base nesses estudos, a ferramenta de avaliação funcional quantitativa irá detectar e quantificar episódios de instabilidade com base na cinemática relativa do MDL-BDS.
O sistema EQUIMETRIX utiliza o conceito de "tempo de contacto" (CDM-BDS) para quantificar em tempo real o estado postural de um sujeito.
2.2 Objectivo 2: INTEGRAÇÃO DO SISTEMA EQUIMETRIX PARA UTILIZAÇÃO NO LABIOMEP
Os três marcos propostos para este objetivo: Marco 2.1: Sincronização de dispositivos, Marco 2.2: Definição do formato dos dados guardados e Marco 2.3: Adaptação do software de coleta de dados; foram desenvolvidos em várias fases. São descritos mais detalhadamente a seguir:
Preparação e envio de um pré-protótipo EQUIMETRIX inacabado com acesso a um software básico de aquisição de dados. Este pré-protótipo permitiu à LABIOMEP conhecer o sistema e poder definir em detalhe o protocolo de recolha de dados. O pré-protótipo enviado é mostrado na Figura 11 e foi enviado no final de janeiro de 2019.
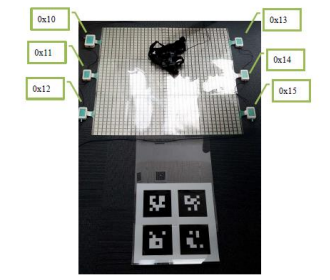
Figura 11 - Pré-protótipo EQUIMETRIX enviado ao LABIOMEP.
Após o envio do pré-protótipo e remotamente, foi realizado um treino para investigadores da LABIOMEP sobre a instalação e uso do sistema e sobre os fundamentos e métodos de cálculo em que se baseia a solução EQUIMETRIX.
Apoiar e ajudar a definir o protocolo de medições e ensaios a realizar. A TECNALIA colaborou e contribuiu para uma definição conjunta do protocolo de medição e comparação a realizar no projeto 2. Os detalhes deste protocolo estão incluídos no relatório de progresso 2 correspondente ao projeto 2:
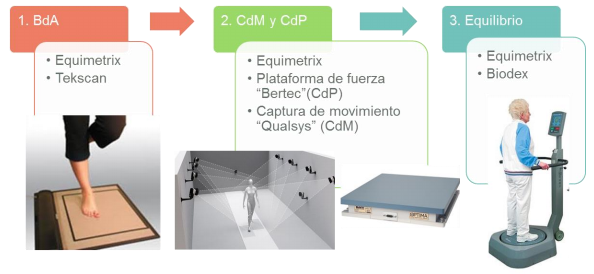
Figura 12 - Pré-protótipo EQUIMETRIX enviado ao LABIOMEP.
3. Preparação e expedição de um protótipo EQUIMETRIX completo, obtido após a conclusão da etapa 1.1 (ver figura 13). Este protótipo foi enviado ao LABIOMEP em abril de 2019, uma vez que o protocolo de medições foi definido e inclui a adaptação do software para registro de dados.
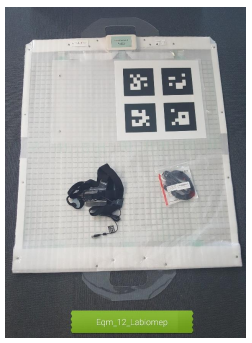
Figura 13 - Protótipo EQUIMETRIX completo enviado ao LABIOMEP.
Além disso, e durante as medições realizadas pela LABIOMEP até o momento, a TECNALIA tem dado suporte na resolução das dúvidas e problemas que surgiram na utilização do protótipo enviado.
