Visión Artificial, Ciudades Inteligentes y Calidad de Vida

A día de hoy, más de la mitad de la población mundial, en concreto, el 57% según datos del Banco Mundial [1], vive en entornos urbanos. Además, la tendencia es creciente, y se estima que 7 de cada 10 personas vivirán en ciudades en 2050 [2]. En España debemos sentirnos especialmente urbanitas, ya que este porcentaje se eleva ya al 81%, según la misma fuente [3]. El modelo de ciudad que conocemos hoy en día podría estar mostrando signos de fatiga y quizá es necesario una redefinición de los entornos urbanos a medio plazo. Pero, por el momento, no es posible deconstruir ciudades por completo para reconstruirlas de nuevo con criterios sostenibles. La alternativa es, por tanto, transformar nuestros espacios urbanos paulatinamente a la vez que vivimos en ellos. En este camino de compromiso, los avances tecnológicos actuales nos pueden echar una buena mano.
El objetivo es lograr que nuestras ciudades sean espacios inteligentes, agradables, sostenibles y limpios; en los que el ciudadano se sienta partícipe de las decisiones que le afectan y sea un entorno seguro y agradable para él. Este concepto se conoce como Smart City (o ciudad inteligente, en castellano). Para la Comisión Europea [4], “una ciudad inteligente es un lugar en el que las redes y servicios tradicionales se hacen más eficientes con el uso de soluciones digitales en beneficio de sus habitantes y empresas”. Este es un asunto de interés en Europa y, como reflejo de esta preocupación, las políticas de innovación incluyen acciones en este contexto [5].
En el grupo de Computación Avanzada, Percepción y Optimización de la Universidad Rey Juan Carlos (CAPO-URJC), hemos trabajado en temas relacionados con la aplicación de nuevas tecnologías basadas en Visión Artificial y su aplicación en ciudades inteligentes. En los siguientes párrafos, presentamos algunos de nuestros trabajos y resultados en este ámbito.

Figura 1: Un ejemplo de detección automática de vehículos invadiendo el carril bus con BusVigía.
El proyecto BusVigía [6] comenzó en el año 2010 como una colaboración de la URJC con la EMT de Madrid para desarrollar un sistema de detección de la ocupación indebida del carril bus por parte de vehículos particulares utilizando técnicas de Visión Artificial. Este sistema está formado por una cámara y un dispositivo de cómputo ligero que se embarca en los propios autobuses. Permite detectar automáticamente los vehículos particulares que se encuentran obstaculizando la circulación normal en los carriles reservados para vehículos de uso público (ver Figura 1). Tuvimos la oportunidad de probar el sistema desarrollado durante un período de pruebas y los resultados fueron muy prometedores. Creemos que la implantación del sistema BusVigía haría innecesaria la presencia de los separadores físicos del carril bus (denominados popularmente como aletas de tiburón) lo que llevaría asociadas dos grandes ventajas: mejora de la seguridad vial, al eliminar de la calzada un potencial elemento de riesgo, y posibilidad de dar usos diversos al carril bus (por ejemplo, aparcamiento nocturno o circulación de vehículo privado en determinadas franjas). Finalmente, cabe destacar que se desarrolló una patente [7] que fue aprobada por la OEPM.
Otro ejemplo de investigación relacionada que hemos acometido durante estos años tiene que ver con el control del tráfico utilizando diversas técnicas. Colaboramos con las empresas Vigidar e InteoMedia en el desarrollo de un sistema de alerta para la detección de vehículos circulando a alta velocidad. Este proyecto fue pionero en el uso de radares marinos en un ámbito urbano y culminó con un trabajo publicado en una revista científica de impacto [8] en el año 2013. Posteriormente, desarrollamos una metodología de desarrollo de herramientas software que permite el modelado de tareas de visión artificial en entornos diversos, entre ellos, la ciudad y el control de tráfico [9]. El objetivo consiste en dotar a las autoridades locales de una herramienta que permita monitorizar el uso de las infraestructuras de su ciudad, de manera que puedan tomar mejores decisiones, disponiendo de información cuantitativa. En la Figura 2 se muestra un ejemplo de monitorización de uso de una rotonda.

Figura 2: Monitorización del uso de una rotonda con la biblioteca de software de modelado [9].
En el proyecto “Reconocimiento de contenedores de residuos en imágenes y vídeo utilizando técnicas avanzadas de aprendizaje automático” financiado por Ecoembes (una empresa sin ánimo de lucro dedicada a la gestión de residuos sólidos urbanos), desarrollamos una herramienta que combina técnicas de visión artificial y sistemas GPS para detectar y geolocalizar contenedores de residuos urbanos. Por otro lado, como fruto de esta colaboración también se desarrolló un sistema de visión artificial que permite clasificar diferentes tipos de contenedores de residuos mediante visión artificial. El objetivo es mejorar la gestión de estos elementos de mobiliario urbano [11] .
El proyecto Smart Eyes for Smart Cities (en español, Ojos Inteligentes para Ciudades Inteligentes) [10], financiado por el Ministerio de Ciencia e Innovación del Gobierno de España y los fondos FEDER, nos ha permitido continuar con estas líneas de investigación relacionadas con el desarrollo del concepto de ciudad inteligente. En este proyecto se proponen métodos de Visión Artificial combinados con técnicas de Inteligencia Artificial para desarrollar tareas diversas en el entorno urbano de manera automatizada. El proyecto incluye, además, el desarrollo de casos de estudio práctico. Uno de ellos, surge como continuación de la línea dedicada a la gestión automatizada del mobiliario urbano, y ha dado lugar a un sistema de reconocimiento de tipos de contenedor cuyos resultados mejoran el desarrollo anterior [12]. Por otro lado, se plantea avanzar en el desarrollo de sistemas de conducción autónoma. En este caso de estudio, destaca el desarrollo de una biblioteca software de métodos de aprendizaje por refuerzo. Además, hemos propuesto un sistema de detección visual de balizas para el guiado de sistemas autónomos [13].
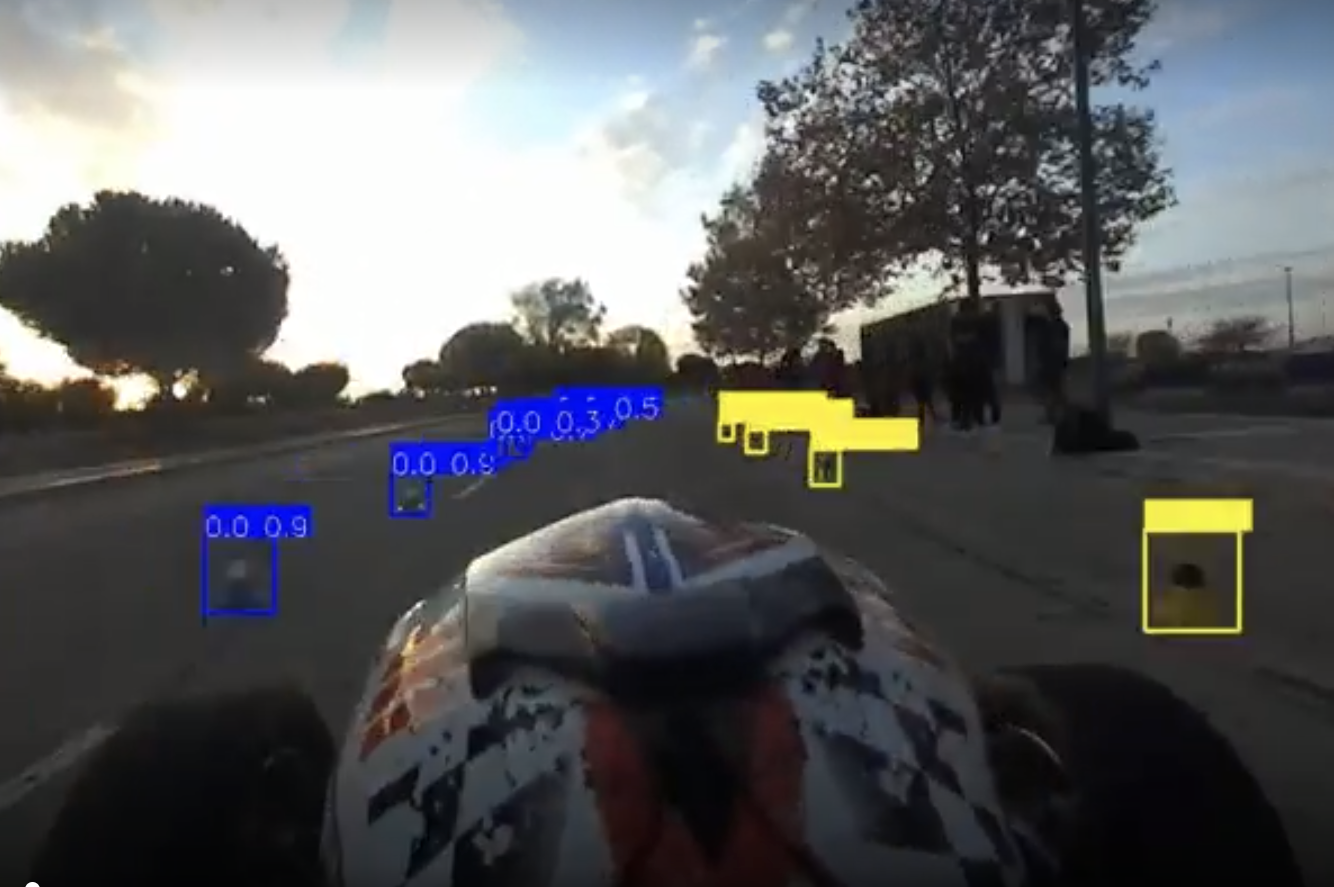
Figura 3: Detección de balizas para el guiado de sistemas autónomos.
En resumen, pensamos que la combinación de métodos basados en Visión Artificial con las últimas técnicas de Aprendizaje Automático pueden ayudar en el camino al desarrollo de espacios urbanos más accesibles, sostenibles y habitables, ayudando a reducir la contaminación, colaborando en el cuidado de los activos humanos y en la conservación de los activos materiales. Trabajamos en estos proyectos de investigación con la esperanza de que estos avances puedan contribuir a la mejora de la calidad de vida de los ciudadanos y en la mejora del entorno urbano.
Agradecimientos:
Esta investigación ha sido parcialmente financiada por el proyecto con referencia RTI2018-098743-B-I00 (MICINN/FEDER).
Referencias:
[1] https://data.worldbank.org/indicator/SP.URB.TOTL.IN.ZS
[3] https://data.worldbank.org/indicator/SP.URB.TOTL.IN.ZS?name_desc=true&locations=ES
[5] https://ec.europa.eu/inea/en/horizon-2020/smart-cities-communities
[6] BusVigía: Sistema distribuido de monitorización automática para el análisis de la ocupación indebida del carril-bus de Madrid. Financiado por la Universidad Rey Juan Carlos y la Empresa Municipal de Transportes de Madrid. Proyecto de investigación de la Cátedra de Ecotransporte, Tecnología y Movilidad.
[7] Fernández-López D, Montemayor AS, Pantrigo JJ, Delgado M. Sistema de identificación de vehículos que obstaculizan el carril-bus. Patente P201200717/ES 2441293 B2.
[8] Sánchez-Oro J, Fernández-López D, Cabido R, Montemayor AS, Pantrigo JJ. "Radar-based road-traffic monitoring in urban environments". Digital Signal Processing, 23(1):364-374 (2013).
[9] Fernández-López D, Cabido R, Sierra-Alonso A, Montemayor AS, Pantrigo JJ. "A Knowledge-based Component Library for High-Level Computer Vision Tasks". Knowledge-Based Systems 70:407-419 (2014)
[10] Ojos Inteligentes para Ciudades Inteligentes. Ayudas a Proyectos de I+D+i «Retos investigación» correspondientes al Programa Estatal de I+D+i Orientada a los Retos de la Sociedad (convocatoria 2018) Ref: RTI2018-098743-B-I00 (MICINN/FEDER)
[11] Ramírez I, Cuesta A, Pantrigo JJ, Montemayor AS, Moreno JL, Alonso MV, Anguita G, Palombarani L. "Convolutional neural networks for computer vision-based detection and recognition of dumpsters". Neural Computing and Applications 32: 13203–13211 (2020)
[12] García-Espinosa F, Concha D, Pantrigo JJ, Cuesta A. "Visual classification of dumpsters with capsule networks". Multimedia Tools and Applications (in press)
[13] Albaráñez J, Llopis-Ibor L, Hernández-García G, De Luelmo SP, Hernández-Ferrándiz D. A Case of Study on Traffic Cone Detection for Autonomous Racing on a Jetson Platform. Lecture Notes in Computer Science, 2022, 13256 LNCS, pp. 629–641

