
Nowadays, more than half of the world's population, 57% according to the World Bank [1], lives in urban environments. Moreover, the trend is growing, and it is estimated that 7 out of 10 people will live in cities by 2050 [2]. In Spain, we should feel particularly urbanised, as this percentage is already 81%, according to the same source [3]. The city model we know today could be showing signs of fatigue and perhaps a redefinition of urban environments is needed in the medium term. But, for the moment, it is not possible to completely deconstruct cities in order to rebuild them again with sustainable criteria. The alternative is therefore to gradually transform our urban spaces as we live in them. On this path of compromise, today's technological advances can lend us a helping hand.
The aim is to make our cities smart, pleasant, sustainable and clean spaces, where citizens feel that they are involved in the decisions that affect them and where they feel safe and comfortable. This concept is known as Smart City. For the European Commission [4], "a smart city is a place where traditional networks and services are made more efficient through the use of digital solutions for the benefit of its inhabitants and businesses". This is an issue of concern in Europe and, reflecting this concern, innovation policies include actions in this context [5].
In the Advanced Computing, Perception and Optimisation group of the Rey Juan Carlos University (CAPO-URJC), we have been working on topics related to the application of new technologies based on Artificial Vision and its application in smart cities. In the following paragraphs, we present some of our work and results in this field.

Figure 1: An example of automatic detection of vehicles invading the bus lane with BusVigía.
The BusVigía project [6] began in 2010 as a collaboration between the URJC and the EMT of Madrid to develop a system for detecting undue occupation of the bus lane by private vehicles using Artificial Vision techniques. This system is made up of a camera and a light computing device that is installed on the buses themselves. It automatically detects private vehicles that are obstructing the normal traffic flow in the lanes reserved for public vehicles (see Figure 1). We had the opportunity to test the developed system during a trial period and the results were very promising. We believe that the implementation of the BusVigía system would make the presence of the physical bus lane separators (popularly known as shark fins) unnecessary, which would have two major advantages: improved road safety by eliminating a potential risk element from the road, and the possibility of using the bus lane for different purposes (e.g. overnight parking or private vehicle circulation in certain areas). Finally, it should be noted that a patent [7] was developed and approved by the SPTO.
Another example of related research that we have undertaken over the years concerns traffic control using various techniques. We collaborated with the companies Vigidar and InteoMedia in the development of a warning system for the detection of speeding vehicles. This project pioneered the use of marine radar in an urban environment and culminated in a paper published in an impact scientific journal [8] in 2013. Subsequently, we developed a methodology for the development of software tools that enable the modelling of machine vision tasks in diverse environments, including the city and traffic control [9]. The objective is to provide local authorities with a tool that allows them to monitor the use of their city's infrastructures so that they can make better decisions with quantitative information. Figure 2 shows an example of monitoring the use of a roundabout.

Figure 2: Monitoring the use of a roundabout with the modelling software library [9].
In the project "Recognition of waste containers in images and video using advanced machine learning techniques" funded by Ecoembes (a non-profit company dedicated to municipal solid waste management), we developed a tool that combines artificial vision techniques and GPS systems to detect and geolocate urban waste containers. On the other hand, as a result of this collaboration, we also developed an artificial vision system that allows the classification of different types of waste containers by means of artificial vision. The aim is to improve the management of these elements of urban furniture [11] .
The Smart Eyes for Smart Cities project [10], financed by the Spanish Ministry of Science and Innovation and FEDER funds, has allowed us to continue with these lines of research related to the development of the smart city concept. This project proposes Artificial Vision methods combined with Artificial Intelligence techniques to develop different tasks in the urban environment in an automated way. The project also includes the development of practical case studies. One of them arises as a continuation of the line dedicated to the automated management of urban furniture, and has given rise to a container type recognition system whose results improve on the previous development [12]. On the other hand, progress is being made in the development of autonomous driving systems. In this case study, the development of a software library of reinforcement learning methods stands out. In addition, we have proposed a visual beacon detection system for the guidance of autonomous systems [13].
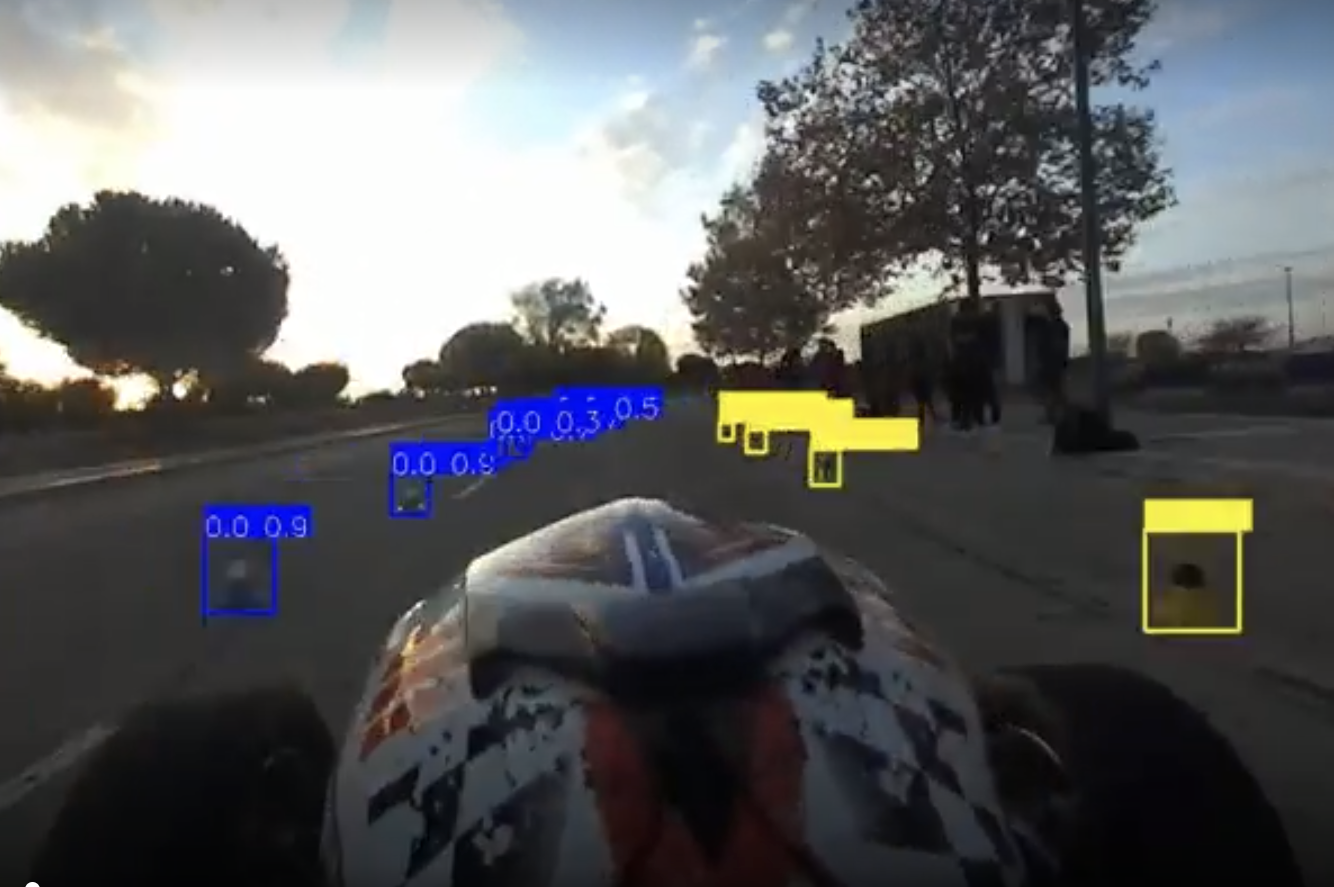
Figure 3: Detection of beacons for the guidance of autonomous systems.
In summary, we believe that the combination of methods based on Artificial Vision with the latest Machine Learning techniques can help on the way to the development of more accessible, sustainable and livable urban spaces, helping to reduce pollution, collaborating in the care of human assets and in the conservation of material assets. We are working on these research projects in the hope that these advances can contribute to the improvement of the quality of life of citizens and the improvement of the urban environment.
Acknowledgements:
This research has been partially financed by the project with reference number RTI2018-098743-B-I00 (MICINN/FEDER).
References:
[1] https://data.worldbank.org/indicator/SP.URB.TOTL.IN.ZS
[3] https://data.worldbank.org/indicator/SP.URB.TOTL.IN.ZS?name_desc=true&locations=ES
[5] https://ec.europa.eu/inea/en/horizon-2020/smart-cities-communities
[6] BusVigía: Sistema distribuido de monitorización automática para el análisis de la ocupación indebida del carril-bus de Madrid. Financiado por la Universidad Rey Juan Carlos y la Empresa Municipal de Transportes de Madrid. Proyecto de investigación de la Cátedra de Ecotransporte, Tecnología y Movilidad.
[7] Fernández-López D, Montemayor AS, Pantrigo JJ, Delgado M. Sistema de identificación de vehículos que obstaculizan el carril-bus. Patente P201200717/ES 2441293 B2.
[8] Sánchez-Oro J, Fernández-López D, Cabido R, Montemayor AS, Pantrigo JJ. "Radar-based road-traffic monitoring in urban environments". Digital Signal Processing, 23(1):364-374 (2013).
[9] Fernández-López D, Cabido R, Sierra-Alonso A, Montemayor AS, Pantrigo JJ. "A Knowledge-based Component Library for High-Level Computer Vision Tasks". Knowledge-Based Systems 70:407-419 (2014)
[10] Ojos Inteligentes para Ciudades Inteligentes. Ayudas a Proyectos de I+D+i «Retos investigación» correspondientes al Programa Estatal de I+D+i Orientada a los Retos de la Sociedad (convocatoria 2018) Ref: RTI2018-098743-B-I00 (MICINN/FEDER)
[11] Ramírez I, Cuesta A, Pantrigo JJ, Montemayor AS, Moreno JL, Alonso MV, Anguita G, Palombarani L. "Convolutional neural networks for computer vision-based detection and recognition of dumpsters". Neural Computing and Applications 32: 13203–13211 (2020)
[12] García-Espinosa F, Concha D, Pantrigo JJ, Cuesta A. "Visual classification of dumpsters with capsule networks". Multimedia Tools and Applications (in press)
[13] Albaráñez J, Llopis-Ibor L, Hernández-García G, De Luelmo SP, Hernández-Ferrándiz D. A Case of Study on Traffic Cone Detection for Autonomous Racing on a Jetson Platform. Lecture Notes in Computer Science, 2022, 13256 LNCS, pp. 629–641

