Nuevas herramientas tecnológicas para la valoración y entrenamiento del control postural, y su validación con sistemas “gold standard” en laboratorio de biomecánica

PROYECTO INDIVIDUAL. INFORME 1. Estudio del Estado del Conocimiento y Análisis científicotécnico
1. Presentación
El objetivo general del programa BABEN es la investigación en nuevas soluciones tecnológicas para la valoración y entrenamiento del control postural dirigidas a la detección precoz del riesgo de caídas y fragilida en personas mayores, y al entrenamiento o ejercitación del equilibrio para prevenir los riesgos de caída. Esta investigación incluye dos proyectos:
- Proyecto 1: Con el objetivo general de desarrollar el sistema de valoración y entrenamiento del control postural.
- Proyecto 2: Con el objetivo general de validar el funcionamiento del sistema desarrollado en el proyecto 1, así como de sus funciones de valoración y entrenamiento, en comparación con los sistemas gold estándar de cinemática y dinámica del equilibrio y regulación postural en humanos.
BABEN pretende dar respuesta a la demanda existente de nuevas soluciones o dispositivos de valoración y entrenamiento del equilibrio o control postural que proporcionen medidas cuantitativas que estén correlacionadas con escalas funcionales clínicas. Buscamos generar soluciones que superen las limitaciones que los dispositivos actualmente disponibles en el mercado presentan; en cuanto a:
• Coste, más reducido,
• portabilidad, facilidad de instalación y puesta en marcha,
• medida cuantitativa de la estabilidad o control postural,
• que esté contrastada o validada con equipos gold standard,
Ante el envejecimiento progresivo de nuestras poblaciones y el consecuente aumento del número de usuarios mayores, el programa BABEN ofrece nuevas soluciones validadas que facilitarán a los profesionales y terapeutas una valoración más funcional del equilibrio y estabilidad de los pacientes. Soluciones que hagan posible incrementar el número de pacientes valorados en los propios centros de atención primaria, favoreciendo la detección precoz de pérdida de capacidad funcional y riesgo de caída y por tanto haciendo posible una intervención temprana para reducir dichos riesgos. Todo ello redundará en un mejor mantenimiento de la capacidad funcional en pacientes mayores y por tanto una mejora en su calidad de vida y capacidad para realización de actividades de la vida diaria.
Los equipos disponibles en el mercado que permiten el estudio simultáneo del COM y BOS (como los sistemas de captura de movimientos basados en tecnología óptica o sensores inerciales) están lejos de ser
democratizados en un ambiente clínico o para-clínico y deportivo. De hecho, incluso para espacios de investigación científica, constituyen dispositivos de alto costo.
El proyecto 1 del programa BABEN tiene por objetivo el desarrollo de una solución que responda a estas demandas. Partiendo de un primer prototipo desarrollado por TECNALIA, denominado EQUIMETRIX, el
objetivo principal del proyecto 1 es generar una versión evolucionada de nuevo tipo de dispositivo para valoración y entrenamiento del equilibrio (Equimetrix) en base a los resultados de la valoración realizada en el proyecto 2.
La existencia de un sistema como Equimetrix, debidamente validado en relación con el gold estándar tecnológico, es nuclear para extender la evaluación en profundidad del equilibrio y de la regulación postural; evaluación que resulta decisiva en el contexto de prevención y la promoción de la salud en las personas mayores, reduciendo la fragilidad y previendo la ocurrencia de caídas.
2. Motivación. La importancia del control postural y equilibrio en las personas mayores: Fragilidad y caídas
Las caídas son una causa importante de discapacidad, morbilidad y mortalidad en las personas mayores. Aproximadamente un 30% de las personas mayores de 65 años y un 50% de las mayores de 80 años, sufren una caída al año (American Geriatrics Society 2010). De los mayores que se caen, la mitad tienen caídas recurrentes, el 50% se vuelve a caer en el mismo año. La caída es, por tanto, un factor de riesgo para sufrir nuevas caídas.
Las caídas en personas mayores tienen graves consecuencias. Tal y como se refleja en la pirámide lesional de la figura siguiente (Fig. 4), más de un 70% tienen consecuencias clínicas como fracturas, heridas, esguinces, etc. y más de la mitad presentan secuelas posteriormente (American Geriatrics Society 2010); el 50% de las personas que sufren una fractura por una caída no recuperan el nivel funcional previo. Además, una de cada diez caídas genera lesiones graves, incluyendo la fractura de cadera.

Figura 1: Pirámide lesional. Consecuencias de las caídas en mayores de 65 años. Fuente: (Ministerio de Sanidad, Servicios Sociales e Igualdad, 2014)
Se estima que un 40% de los casos de asistencia institucional de larga duración son debidos a caídas. La edad es el mayor factor de riesgo de las lesiones por caídas. Los adultos de edad avanzada ingresan en el hospital por lesiones relacionadas con esta causa con una frecuencia cinco veces mayor que por lesiones debidas a otros motivos, y sus lesiones suelen presentar una mayor gravedad, a la vez que las posibilidades de intervención se reducen. La discapacidad y la mortalidad son consecuencias muy habituales.
Con ser de interés los fallecimientos secundarios a caídas, otras consecuencias de las caídas tienen, desde la perspectiva de salud general de la población, un impacto muy superior. Atendiendo a los datos de la figura anterior (Fig. 1), se puede calcular que por cada persona que fallece como consecuencia de una caída, 24 han sufrido un ingreso hospitalario por fractura de cuello de fémur (fractura de cadera), casi 100 habrán sufrido una caída con consecuencias graves y cerca de 1000 persona mayores habrán sufrido una caída con consecuencias.
Con frecuencia las consecuencias médicas de las caídas, entre las que destaca el denominado síndrome de caída (temor a caerse), suponen el inicio de la discapacidad en el anciano (Abizanda Soler et al. 2010). En España, las consecuencias de las caídas suponen también un elevado coste para el sistema sanitario. Concretamente una de las consecuencias más graves es la fractura de cadera. En las personas mayores, la fractura de cadera es la causa más frecuente de ingreso en el hospital en los servicios de traumatología y ortopedia. Es una lesión de creciente importancia en el conjunto de la sociedad, tanto en términos económicos como sociales. Se estima que en un 90% de los casos son debido a caídas. Durante los últimos años la evolución de las altas hospitalarias por esta causa ha sufrido un aumento constante, especialmente entre las mujeres, llegando a incrementarse hasta en un 50% en los mayores de 74 años en menos de 15 años, desde 1997 hasta 2011.
Las mujeres tienen un mayor riesgo de caídas que los hombres y también sufren consecuencias más graves, con un mayor porcentaje de fracturas de cadera, tres veces más que los hombres. En un estudio en 2008 se estimó en 8365€ el coste medio por paciente (alta) por esta causa (Instituto de Información Sanitaria 2010).
Dado el impacto que las caídas tienen en la salud individual y en el sistema de salud, y por su estrecha relación con la discapacidad y el síndrome de la fragilidad previo a la condición de dependencia, los nuevos protocolos de consenso para la intervención sanitaria los tratan en conjunto. Así, la nueva propuesta de intervención del Sistema Nacional de Salud (SNS) detallada en el “Documento de Consenso sobre prevención de fragilidad y caídas en la persona mayor” anteriormente citado (documento aprobado por el Consejo Interterritorial del Sistema Nacional de Salud el 11 de junio de 2014) tiene por objetivo “detectar e intervenir sobre la fragilidad y el riesgo de caídas en la persona mayor, como medio para evitar y/o retrasar el deterioro funcional, así como promover la salud en la población mayor de 70 años” y además en el ámbito de la Atención Primaria y el entorno comunitario, en coordinación con los recursos especializados geriátricos y hospitalarios oportunos, a través de la identificación precoz de personas con riesgo de sufrir caídas y el desarrollo de estrategias para su prevención.
En la descripción general de dicha intervención se indica que el primer componente preventivo esencial a incluir en un eventual plan de intervención y seguimiento individualizado de pacientes frágiles consiste en los programas de actividad física multi-componente, que trabajen, entre otros aspectos, el equilibrio. La prueba a utilizar de forma preferente para el cribado de fragilidad/limitación funcional será la prueba de ejecución Short Physical Performance Battery (SPPB) que combina equilibrio, velocidad de la marcha y levantarse de la silla. Esta priorización se basa en su buena validación para detectar fragilidad y elevada fiabilidad en predecir discapacidad, así como su factibilidad de uso en Atención Primaria (Cabrero-García et al. 2012; Freiberger et al. 2012).
Y es que para la predicción de la fragilidad y el riesgo de caídas resulta de utilidad determinar si existe un problema de equilibrio postural. Actualmente, para valorar el riesgo de caídas, los profesionales de la salud utilizan test estáticos como el test de Romberg, combinado normalmente con otros test dinámicos como la escala de equilibrio Berg y algunos cuestionarios generales. Tal y como se ha referido, las pruebas de ejecución funcional, tales como el SPPB y el test de LAC/TUG (Levantar y Andar Cronometrado / Timed get Up and Go) son las pruebas más sencillas y cortas que permiten detectar problemas funcionales y son consideradas fiables porque se basan en una medida cuantitativa como es el tiempo utilizado en la realización de las tareas y no en una escala discreta como son las utilizadas en otros tests.
Estos métodos han demostrado ser fiables para identificar el riesgo de caídas, si bien no son herramientas que cuantifican el nivel de estabilidad del paciente y que permitan diferenciar entre distintos problemas de equilibrio o estabilidad. Para la práctica clínica, es ampliamente reconocida actualmente la viabilidad y utilidad del uso de soluciones tecnológicas y sistemas informáticos que permitan una medida objetiva del control del equilibrio postural de la persona. Una herramienta de valoración cuantitativa debería tener las siguientes 4 características (Mancini and Horak 2010): 1) Realizar medidas que reflejen tanto la capacidad como la calidad de las estrategias posturales, 2) Sensibilidad para detectar las anomalías de control postural, 3) Fiabilidad y validez, 4) Practicidad, sencillez de uso y bajo coste. Y es en este campo en el que se enfoca el proyecto, nuevas herramientas cuantitativas de evaluación del equilibrio postural; herramientas que proporcionen medidas cuantitativas que estén correlacionadas con escalas funcionales clínicas.
3. Estado del conocimiento
3.1 El control postural La habilidad humana para mantener el equilibrio es una función compleja, pudiéndose ser analizada desde múltiples puntos de vista. Tres de ellos son particularmente interesantes:
1. el equilibrio estático frente al dinámico; 2. la capacidad de mantener un equilibrio estable cuando se enfrentan a diferentes desafíos; y 3. las estrategias básicas para mantener el equilibrio.
Al nivel superior, contextualmente, el equilibrio puede dividirse entre estático y dinámico, dependiendo de si se pretende mantener una postura corporal o evitar caídas durante movimientos como la locomoción. El equilibrio estático se produce cuando la resultante de las fuerzas que actúan sobre el cuerpo hace que esté en reposo o no se desplace, mientras que el equilibrio dinámico se produce en movimientos no uniformes por la intervención de fuerzas inerciales, donde un cuerpo parece estar en aparente desequilibrio pero no se cae [1]. Por otra parte, el control del equilibrio en estado estacionario, anticipativo y reactivo se relaciona con los tipos de desafío al equilibrio que se contrarresten. Estos desafíos pueden clasificarse a su vez como perturbaciones internas o autogeneradas, como el alcance voluntario, y externas, como un empujón. Finalmente, el control del equilibrio se logra a través de movimientos que se componen de estrategias básicas o acciones fundamentales coordinadas de los miembros inferiores, destinadas a mantener o recuperar el equilibrio. Por ejemplo, el equilibrio de pie se conserva mediante estrategias usando el tobillo, la cadera y los pasos, mientras que el equilibrio al caminar utiliza estrategias de posicionamiento de los pies. Las evaluaciones pueden abordar diferentes aspectos del equilibrio, de acuerdo con estas distinciones, por ejemplo:
1. evaluación al estar de pie o al caminar, 2. evaluación con o sin perturbaciones externas o movimientos de anticipación.
Los seres humanos, poseedores de dos piernas, de pie o caminando, y los robots humanoides, son ejemplos de bípedos que como sistema mecánico se caracterizan por una posición relativamente alta de su centro de masa en comparación con un área de apoyo relativamente pequeña (polígono de apoyo, base de sustentación), y que combinados crean un sistema mecánico delimitado normalmente estable con respecto a la postura erguida. Este sistema tiene una capacidad limitada para hacer frente a perturbaciones sin caerse. Un bípedo es, en una primera aproximación, similar a un péndulo invertido. Este es el modelo más sencillo y más común utilizado para estudiar la marcha o el caminar humano y para extraer los parámetros necesarios para observar el equilibrio [2]. Es un modelo dinámico que se utiliza a menudo para caracterizar la dinámica básica de un bípedo de pie, donde el péndulo virtual invertido conecta el Centro de Masa (el punto virtual donde se concentraría la masa corporal), con el Centro de Presión (el punto virtual por donde pasa el vector de la Fuerza de Reacción del Suelo, ver figura 2).
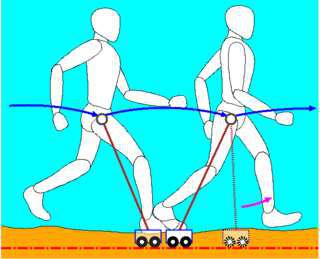
Figura 2: línea roja que muestra el péndulo invertido como modelo de un bípedo que caminado. (ilustración de http://www.mi.ams.eng.osaka-u.ac.jp/member/sugihara/research2009-e.html)
En la práctica clínica actual la evaluación del equilibrio se basa en varias pruebas clínicas bien aceptadas que requieren un médico experto y al menos media hora de tiempo de prueba. Estas pruebas clínicas por lo general comienzan desde una perspectiva funcional, y normalmente evalúan la capacidad de un paciente para realizar actividades específicas mientras mantiene el equilibrio (utilizando escalas ordinales), o miden la velocidad o la duración de la realización de la tarea (por ejemplo, al caminar una distancia específica o durante un tiempo determinado. Algunos ejemplos son: pruebas para tareas estáticas, como la Evaluación de la Movilidad Orientada al Rendimiento (POMA) - Pruebas de Equilibrio o la prueba Tinetti[3], la Postura de una pierna [4] y la Prueba de Equilibrio de Berg (BBT)[3], o pruebas que también incluyen tareas dinámicas como el Timed Up and Go (TUG) [5], y el BESTest [9]. Se pueden encontrar revisiones extensas de los procedimientos de evaluación clínica en [6][7].
En la actualidad se están llevando a cabo investigaciones para realizar evaluaciones similares en el hogar utilizando sensores corporales no intrusivos [8]. El hecho de que existan y se utilicen tantos procedimientos se debe, por una parte, a que hay muchas tareas funcionales que implican equilibrio y por otra, a que no hay una ventaja clara entre las escalas. Una limitación general de tales procedimientos de evaluación es que la capacidad reducida para realizar una tarea funcional (por ejemplo, caminar) puede ser el resultado de una amplia gama de deficiencias sensoriales, motoras y cognitivas que no están necesariamente relacionadas con las habilidades de equilibrio por sí solas [7] y, por lo tanto, también proporcionan poca información diagnóstica funcional sobre un trastorno del equilibrio.
Aparte de estos procedimientos clínicos orientados a la función, la "posturografía" es un conjunto de métodos cuantitativos que utilizan escalas de proporción para cuantificar el rendimiento del equilibrio postural en posición erguida, ya sea en condiciones estáticas o dinámicas. Se pueden encontrar revisiones exhaustivas en [9],[10] y[11].
La posturografía mide la capacidad de mantener el Centro de Masa (CDM) del cuerpo, es decir, su proyección sobre la superficie del suelo, dentro de la Base de Sustentación (BDS) (Figura 3), que es una definición formal y física del equilibrio estático. Los movimientos del Centro de Presión (COP) reflejan el control activo del sujeto para mantener la proyección vertical del CDM del cuerpo dentro de la base de sustentación [12], y así proporcionar información relacionada pero complementaria. En condiciones estáticas, la BDS permanece estacionaria y sólo el CDM se mueve.


Figura 3. Ilustración de los indicadores biomecánicos más utilizados (COM, COMv, COP, BOS, GRF) que describen o contienen información sobre las condiciones de equilibrio. Las características de uno o una combinación de estos indicadores se utilizan para describir el desempeño del equilibrio en la posturografía actual.
Sin embargo, en condiciones dinámicas ambos, BOS y COM están en movimiento [44]. Por tanto, la posturografía dinámica, a diferencia de la estática, implica enfrentarse a perturbaciones externas aplicadas por los movimientos de la superficie de apoyo, y está relacionada con el "control reactivo del equilibrio". Los movimientos planares COM (es decir, COM) y COP se especifican mediante diferentes métricas para describir la respuesta del equilibrio [13]. En la Tabla 1 se incluyen varias métricas utilizadas en la literatura.
Muchas de estas métricas están correlacionadas con el riesgo de caída o con algunas de las escalas clínicas descritas anteriormente, pero la interpretación exacta de la normalidad y la anormalidad, así como su interpretación, sigue siendo tema de investigación. Para interpretar adecuadamente las movimientos del COP y el COM en su interrelación actualmente se utilizan en la investigación métodos que aplican perturbaciones bien definidas (externas, sensoriales o motoras) en combinación con técnicas de identificación de sistemas de bucle cerrado [14][15]. Estas técnicas pueden revelar las causas de movimiento y control anormales del COP y el COM, identificar cuál de los sistemas subyacentes (sistema vestibular, generación de fuerza muscular, coordinación muscular) está deteriorado y hasta qué punto [10].
La Tabla 1 contiene métricas que cuantifican el equilibrio, tal como se utiliza en la posturografía y el análisis de la marcha. La mayoría de las métricas presentadas han sido validadas mostrando que son significativamente diferentes entre grupos o condiciones con diferente comportamiento del equilibrio, tales como ancianos en comparación con adultos jóvenes, u ojos abiertos comparados con ojos cerrados. Se recomienda consultar los estudios indicados para los enfoques o métodos de cálculo y para obtener información detallada sobre los grupos o condiciones en los que se ha demostrado que métodos están indicados.
Tabla 1. Revisión de las métricas utilizadas para cuantificar el rendimiento del equilibrio al estar de pie y al caminar Definición de la métrica Validas para estar de pie o caminando

3.2 Herramientas existentes para la medición del control postural
Nos planteamos ahora cómo medir y monitorizar simultáneamente los parámetros relevantes indicados (COM, COP y BOS). Tradicionalmente ambos, el COM y el COP se valoran en un laboratorio de análisis del movimiento humano que cuenta con un sistema óptico, magnético o mecánico para medida del movimiento, y una o varias plataformas de fuerza. Esta infraestructura no está disponible para los médicos y fisioterapeutas, y menos aún para su uso en la actividad diaria. Para superar estas limitaciones y avanzar hacia soluciones portables, se han desarrollado sistemas basados en:
- redes de sensores inerciales portátiles/vestibles (body sensor network) (Luinge and Veltink 2004;
Roetenberg, Baten, and Veltink 2007; Roetenberg et al. 2005; Zijlstra and Hof 2003; Moe-Nilssen 1998) - y/o plataformas de fuerza portátiles/wearables como por ejemplo calzado o plantillas sensorizadas (Liu, Inoue, and Shibata 2010; Mariani et al. 2010; Martin Schepers et al. 2010; Rouhani et al. 2010; Schepers, Koopman, and Veltink 2007; Schepers et al. 2009)
Utilizando estos sensores se han propuesto en los últimos años diversas técnicas. Con una combinación de sensores de imagen, inerciales (IMUs) y de fuerza portátiles/vestibles se podrá estimar continuamente:
- El desplazamiento relativo del COM respecto al COP - y la BOS (su tamaño y forma).
Para la medida de la posición y movimiento del COM se aplican normalmente 3 métodos para estimar la posición del COM:
1) el análisis segmental basado en el movimiento de los segmentos y un modelo antropométrico del cuerpo humano 2) la doble integración de la fuerza de reacción del suelo (aplicando la segunda ley de Newton) 3) el movimiento de la pelvis, asumiendo que el movimiento del COM puede aproximarse a través del movimiento de la pelvis.
En el proyecto se opta como método de medición este tercero, el movimiento de la pelvis, ya que se busca sea una solución que precise el mínimo número de sensores a colocar en el cuerpo humano.
Durante los últimos 30 años, se han propuesto herramientas instrumentales para evaluar cuantitativamente los parámetros del equilibrio postural. Medir la estabilidad directamente es imposible... no es una magnitud, sino simplemente una aptitud, permitiendo que el cuerpo vuelva hacia la posición de equilibrio cuando se aleja de ella. Sin embargo, la estabilidad tiene características que sí se pueden medir. La fuerza y la plataforma estabilométrica (Fuerza de Reacción del Suelo, COP) son actualmente los dispositivos más utilizados. La cinemática COM en la actualidad también es accesible, pero a través de dispositivos costosos (Figura 4). Estas son las razones por las que actualmente, en las clínicas, las herramientas utilizadas para la evaluación del equilibrio utilizan la COP o distribución de la presión plantar a través de plataformas de fuerza y/o alfombras sensorizadas para la medición de la presión. Estas técnicas por sí solas no reflejan si la postura del cuerpo durante la acción en curso es estable o no. No tienen en cuenta la parte superior del cuerpo (o COM), que obviamente también participa durante la ejecución de una tarea dinámica y es clave en las actividades diarias.
Como se indica en la Tabla 1, existen evidencias científicas que respaldan el paradigma de que un análisis conjunto de la COM-COP o de la colocación de los pies en la COM refleja una mejor estabilidad funcional humana, durante las tareas dinámicas, que la COP o la COM sola.

Figura 4. Tipos de productos para medir la información relacionada con el equilibrio (COP, COM, BOS)
Los productos comerciales empleados en la valoración del equilibrio se pueden dividir en la siguiente clasificación (ver figura 5):
• Equipos de Estabilometría: Estos productos ofrecen métodos de evaluación y entrenamiento del control postural empleando solo el COP (COP path, COP maximal excursion, Statokinesigram).
• Plataformas Baropodométricas: Proporcionan una medida de la distribución plantar desde la que estimamos la BDS. Sin embargo, no permiten medir el COM por sí mismos.
• Sistemas ópticos de captura movimiento: Estos productos ofrecen información completa sobre la cinemática del sujeto a partir de la cual se estima el COM. Son productos caros en coste y en mantenimiento y requieren un alto nivel de formación para ser usados adecuadamente.
• Redes sensores inalámbricos para análisis movimiento: Estos productos también ofrecen información completa sobre la cinemática del sujeto a partir de la cual se estima el COM. Su gran inconveniente es la colocación del sensor en el cuerpo del sujeto. Esto puede llevar más de 15 minutos, lo que les hace inservibles para la práctica clínica.


Figura 5. Características de equipamiento existente para control postural
3.3 Equimetrix: Avanzando en el estado del arte en la medición del control postural
El proyecto avanzará en el estado del arte desarrollando una solución, Equimetrix (ver esquema en figura 6), que combine en un mismo sistema ambas medidas y que las relaciona, con el objetivo de medir la posición relativa del CDM – BDS (o CDM – CDP) fuera de un laboratorio de análisis del movimiento.
• Con respecto a los equipos de estabilomentría, el prototipo Equimetrix proporciona la distribución de contactos plantares (a partir de la cual se estima la BOS). El sensor de visión que incorpora el prototipo provee una estimación del COM.
• Con respecto a las plataformas baropodométricas, el prototipo ofrece también información acerca de la BOS a un precio más asequible
• Frente a los sistemas ópticos, el prototipo Equimetrix ofrece datos del ODM y la BOS (distribución de la presión plantar). La estimación del COM de Equimetrix es de una precisión menor que los sistemas ópticos, pero precisamente el objetivo del proyecto es cuantificar esta pérdida de precisión. Esto permitirá valorar la adecuación de su uso en un entorno clínico.
• Frente a las redes de sensores, que ofrecen medidas del COM y permiten realizar una reconstrucción de la BOS, Equimetrix ofrece una solución con un tiempo de colocación y set-up mucho menor (alrededor de 2 minutos).

Figura 6. Componentes del prototipo Equimetrix
El proyecto parte de un prototipo de Equimetrix cuyos componentes se muestran en la figura 6. Equimetrix presenta un concepto innovador para el análisis del equilibrio y de su valoración en base a un único parámetro denominado “índice de estabilidad”. En comparación con los equipos de estabilometría como con los baropodométricos, el concepto del índice de estabilidad la posición del COM con relación a la BOS (y al COP) es conocida y permite una valoración más fiable y precisa de las capacidades de equilibrio del sujeto.
Sin embargo, el concepto de “índice de estabilidad” utilizado precisa de ser validado frente a equipos estándar utililzados en laboratorios de análisis del movimiento. Por lo tanto, el uso de sistemas gold estándar de determinación de centro de masa 3D por medios ópticos (Qualisys) e inerciales (XSens), así como de medición de presiones plantares (Tekscan / Pedar) y dinamométrico (Bertec) para medición del área de apoyo plantar y migrar del centro de presiones, es fundamental. Así el sistema Equimetrix será analizado por LABIOMEP en sus laboratorios y los resultados de dicho análisis servirán para la mejora del sistema especialmente en dos aspectos:
• Refinamiento en los cálculos de los parámetros de equilibrio a partir de modificaciones realizadas en los correspondientes algoritmos.
• Mejoras en los sensores de la plataforma baropodométrica, tanto en la fabricación, como en el procesamiento de la información que suministran.
Como resultado se obtendrá una versión avanzada del prototipo Equimetrix, cuyas mediciones estarán contrastadas con respecto a dispositivos comerciales de gran precisión y de uso común en los laboratorios de estudio del equilibrio.
La existencia de un sistema como Equimetrix, debidamente validado en relación con el gold estándar tecnológico, es nuclear para extender la evaluación en profundidad del equilibrio y de la regulación postural; evaluación que resulta decisiva en el contexto de prevención y promoción de la salud en las personas mayores, reduciendo la fragilidad y previendo la ocurrencia de caídas, pero también en poblaciones especiales, como los pacientes afectados por enfermedades neurodegenerativas con implicaciones motoras. En estos casos, esta evaluación es decisiva para la prescripción y el control terapéutico.
3.4 Listado de abreviaturas
BBT: Berg Balance Test (Test de equilibrio de Berg) BESTest: Balance Evaluation Systems Test (Sistema de Evaluación del Equilibrio) BOS: Base of Support (Base de Sustentación) COG: Center of Gravity (Centro de Gravedad) COM: Center of Mass (Centro de Masa) COP: Center of Pressure (Centro de Presión) IMU: Inertial Measurement Unit (Unidad de Medición Inercial) POMA: Performance-Oriented Mobility Assessment (Evaluación de la movilidad orientada al rendimiento) TUG: Timed Up and Go (Levanta y Anda) SPPB: Short Physical Performance Battery
3.5 Referencias
[1] Izquierdo, Mikel. Biomecanica y Bases Neuromusculares de la Actividad Fsica y el Deporte / Biomechanics and Neuromuscular Bases of Physical Activity and Sport. Ed. Médica Panamericana. 2008.
[2] Winter, DA. Human Balance and Posture Control during Standing and Walking. Gait & Posture 3(4): 193– 214. 1995.
[3] Tinetti ME. Performance-oriented assessment of mobility problems in elderly patients. Journal of the American Geriatrics Society. 1986.
[4] Jonsson E, Seiger Ã, Hirschfeld H. One-leg stance in healthy young and elderly adults: a measure of postural steadiness?. Clinical Biomechanics. 2004;19(7):688-694.
[5] Berg KO, Maki BE, Williams JI, Holliday PJ, Wood-Dauphinee SL. Clinical and laboratory measures of postural balance in an elderly population. Archives of physical medicine and rehabilitation. 1992;73(11):1073-1080
[6] Deathe AB, Miller WC. The L test of functional mobility: measurement properties of a modified version of the timed “up & go” test designed for people with lower-limb amputations. Physical therapy. 2005;85(7):626-635.
[7] Mancini M, Horak FB. The relevance of clinical balance assessment tools to differentiate balance deficits. European journal of physical and rehabilitation medicine. 2010;46(2):239.
[8] Shumway-Cook A, Woollacott MH. Motor control: translating research into clinical practice. Lippincott Williams & Wilkins; 2007.
[9] Rispens SM, van Schooten KS, Pijnappels M, Daffertshofer A, Beek PJ, van Die. Identification of Fall Risk Predictors in Daily Life Measurements Gait Characteristics’ Reliability and Association With Self-reported Fall History. Neurorehabilitation and neural repair. 2014 1545968314532031.
[10] Prieto TE, Myklebust JB, Hoffmann RG, Lovett EG, Myklebust BM. Measures of postural steadiness: differences between healthy young and elderly adults. IEEE_J_BME. 1996 Sept. ;43(9):956-966.
[11] Pasma J, Engelhart D, Schouten A, Van der Kooij H, Maier A, Meskers C. Impaired standing balance: The clinical need for closing the loop. Neuroscience. 2014;267:157-165.
[12] Visser JE, Carpenter MG, van der Kooij H, Bloem BR. The clinical utility of posturography. Clinical Neurophysiology. 2008;119(11):2424-2436.
[13] Hof A, Gazendam M, Sinke W. The condition for dynamic stability. Journal of biomechanics. 2005;38(1):1-8.
[14] Henry SM, Fung J, Horak FB. Effect of stance width on multidirectional postural responses. J Neurophysiol.
2001 Feb;85(2):559-570.
[15] van der Kooij H, van Asseldonk E, van der Helm FC. Comparison of different methods to identify and quantify balance control. Journal of neuroscience methods. 2005;145(1):175-203.
[16] Engelhart D, Schouten AC, Aarts RGKM, van der Kooij H. Assessment of Multi-Joint Coordination and Adaptation in Standing Balance: a Novel Device and System Identification Technique. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2015;23(6):973-982.
[17] Brewer L, Horgan F, Hickey A, Williams D. Stroke rehabilitation: recent advances and future therapies. QJM. 2013;106(1):11-25.
[18] Tamburella F, Scivoletto G, Molinari M. Balance training improves static stability and gait in chronic incomplete spinal cord injury subjects: a pilot study. Eur. J. Phys. Rehabil. Med. 2013;49:353-364.
[19] Alahmari KA, Marchetti GF, Sparto PJ, Furman JM, Whitney SL. Estimating Postural Control With the Balance Rehabilitation Unit: Measurement Consistency, Accuracy, Validity, and Comparison With Dynamic Posturography. Archives of physical medicine and rehabilitation. 2014;95(1):65-73.
[20] Allum JH, Adkin AL, Carpenter MG, Held-Ziolkowska M, Honegger F, Pierchala K. Trunk sway measures of postural stability during clinical balance tests: effects of a unilateral vestibular deficit. Gait & Posture. 2001 Dec;14(3):227-237.
[21] Bloem BR, Visser JE, Allum JHJ. Chapter 20 Posturography. In: Hallett M, editor. Handbook of Clinical Neurophysiology. Vol 1. Elsevier; 2003. p. 295-336.
[22] Ruhe A, Fejer R, Walker B. Center of pressure excursion as a measure of balance performance in patients with non-specific low back pain compared to healthy controls: a systematic review of the literature. Eur Spine J. 2011 Mar;20(3):358-368.
[23] Najafi B, Horn D, Marclay S, Crews RT, Wu S, Wrobel JS. Assessing postural control and postural control strategy in diabetes patients using innovative and wearable technology. Journal of diabetes science and technology. 2010;4(4):780-791.
[24] Pai YC, Patton J. Center of mass velocity-position predictions for balance control. Journal of biomechanics,1997;30(4):347-354.
[25] Slobounov SM, Slobounova ES, Newell KM. Virtual time-to-collision and human postural control. Journal of motor behavior. 1997;29(3):263-281.
[26] Riccio GE. Information in movement variability about the qualitative dynamics of posture and orientation. University of Illinois at Urbana-Champaign. 1992.
[27] Hasson CJ, Van Emmerik RE, Caldwell GE. Predicting dynamic postural instability using center of mass time- to-contact information. Journal of biomechanics. 2008;41(10):2121-2129.
[28] Hendrickson J, Patterson KK, Inness EL, McIlroy WE, Mansfield A. Relationship between asymmetry of quiet standing balance control and walking post-stroke. Gait \& posture. 2014;39(1):177-181.
[29] Rougier P, Genthon N. Dynamical assessment of weight-bearing asymmetry during upright quiet stance in humans. Gait \& posture. 2009;29(3):437-443.
[30] Nardone A, Godi M, Grasso M, Guglielmetti S, Schieppati M. Stabilometry is a predictor of gait performance in chronic hemiparetic stroke patients. Gait \& posture. 2009;30(1):5-10.
[31] Roerdink M, De Haart M, Daffertshofer A, Donker S, Geurts A, Beek P. Dynamical structure of center-of-pressure trajectories in patients recovering from stroke. Experimental brain research. 2006;174(2):256-269.
[32] van Asseldonk EH, Buurke JH, Bloem BR, Renzenbrink GJ, Nene AV, van der Helm FC, van der Kooij H. Disentangling the contribution of the paretic and non-paretic ankle to balance control in stroke patients. Experimental neurology. 2006;201(2):441-451.
[33] Hausdorff JM, Peng CK, Ladin Z, Wei JY, Goldberger AL. Is walking a random walk? Evidence for long-range correlations in stride interval of human gait. J Appl Physiol (1985). 1995 Jan;78(1):349-358.
[34] Duarte M, Freitas SMSF. Revision of posturography based on force plate for balance evaluation. Rev Bras Fisioter. 2010 Jun;14(3):183-192.
[35] Amoud H, Abadi M, Hewson DJ, Michel-Pellegrino V, Doussot M, Duchêne J. Fractal time series analysis of postural stability in elderly and control subjects. J Neuroeng Rehabil. 2007;4:12.
[36] Yamada N. Chaotic swaying of the upright posture. Human Movement Science. 1995;14(6):711-726.
[37] Ladislao L, Fioretti S. Nonlinear analysis of posturographic data. Medical & biological engineering & computing. 2007;45(7):679-688.
[38] Liu K, Wang H, Xiao J, Taha Z. Analysis of human standing balance by largest lyapunov exponent. Comput Intell Neurosci. 2015;2015:158478.
[39] Maurer C, Peterka RJ. A new interpretation of spontaneous sway measures based on a simple model of human postural control. Journal of Neurophysiology. 2005;93(1):189-200.
[40] Toosizadeh N, Mohler J, Lei H, Parvaneh S, Sherman S, Najafi B. Motor Performance Assessment in Parkinson's Disease: Association between Objective In-Clinic, Objective In-Home, and Subjective/Semi- Objective Measures. PLoS One. 2015;10(4):e0124763.
[41] Kirtley, C. Cait analysis: theory and practice. Elsevier Health Sciences. 2006
[42] Lord, S. R. (2007), Falls in older people : risk factors and strategies for prevention, Cambridge University Press, Cambridge
[43] Hill, K.; Schwarz, J.; Flicker, L. & Carroll, S. (1999), 'Falls among healthy, community-dwelling, older women: a prospective study of frequency, circumstances, consequences and prediction accuracy', Australian and New Zealand journal of public health 23(1), 41--48.
[44] Horak, Fay B. Postural Orientation and Equilibrium: What Do We Need to Know about Neural Control of Balance to Prevent Falls? Age and Ageing 35(suppl 2): ii7–ii11. 2006.

