Nuevas herramientas tecnológicas para la valoración y entrenamiento del control postural, y su validación con sistemas “gold standard” en laboratorio de biomecánica

1. Resumen de logros obtenidos
El proyecto 1 dentro del programa BABEN, tiene como finalidad la investigación en nuevas soluciones tecnológicas para la valoración y entrenamiento del control postural dirigidas a la detección precoz del riesgo de caídas y fragilidad en personas mayores, y al entrenamiento o ejercitación del equilibrio para prevenir los riesgos de caída. Soluciones tecnológicas que faciliten el mantenimiento y recuperación de la capacidad funcional (el equilibrio, en particular) de personas mayores prefrágiles y frágiles.
Los objetivos finales de este proyecto son por una parte la concepción y fabricación de un nuevo dispositivo para la valoración del control postural y su validación técnica con sistemas “gold standard” en laboratorio de biomecánica (esta validación se realizará a través del proyecto 2 del programa integrado BABEN).
Partiendo de una versión o prototipo básico del sistema EQUIMETRIX, TECNALIA ha logrado el diseño y fabricación de una versión evolucionada (ver Figura 1) que integra:
• Un sensor vestible para la captación de movimiento del tronco, que se utiliza en combinación con un patrón visual de referencia colocado en el suelo.
• Una plataforma para medición de la distribución de presión plantar. Una plataforma con un tamaño grande (1x1m) que permite estudiar el equilibrio durante una respuesta de paso.
• Una unidad de procesamiento para la estimación del desplazamiento relativo entre el CDM y la BDS y el cálculo del “Índice de Estabilidad” en tiempo real.
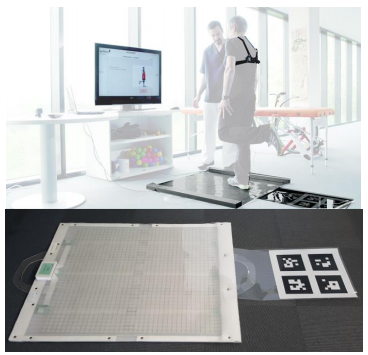
Figura 1 – Prototipo EQUIMETRIX desarrollado
Esta versión del sistema EQUIMETRIX incorpora los siguientes resultados y mejoras:
• Integración en el sistema de la plataforma baropodométrica de fabricación propia y de mayores dimensiones a la anteriormente utilizada. Plataforma flexible, de peso reducido, de fácil integración y de coste de fabricación reducido frente al uso de una plataforma comercial.
• Obtención de un valor más fiable para el índice de estabilidad gracias al empleo de los marcadores ArUco en conjunción con el sensor de visión, lo que facilita la identificación de la posición de la persona portadora del sensor de una manera más rápida y precisa.
Otro logro alcanzado hasta la fecha ha sido la adaptación del prototipo y del software de adquisición, para que pueda ser utilizado por LABIOMEP en el proyecto 2, con el objetivo de validar técnicamente la solución EQUIMETRIX desarrollada comparándola con equipos “gold standard” disponibles en su laboratorio de biomecánica. TECNALIA y LABIOMEP han definido conjuntamente el protocolo de pruebas y comparativas a realizar en dicho análisis. Y sobre ese punto de partida TECNALIA ha adaptado el software para facilitar la adquisición de datos y preparado y enviado un prototipo de EQUIMETRIX a LABIOMEP. A fecha de redacción de este informe se han realizado ya una serie de mediciones y comparativas. Como siguientes pasos, tras la finalización del estudio comparativo que está llevando a cabo LABIOEMP dentro del proyecto 2, queda pendiente el análisis de los resultados de dicha comparativa poder identificar las mejoras necesarias a implementar en el prototipo EQUIMETRIX.
En el siguiente apartado se detallan los resultados obtenidos hasta la fecha.
2. Detalle de resultados alcanzados en relación con cada uno de
los objetivos e hitos propuestos
La siguiente tabla muestra de forma resumida los objetivos e hitos asociados propuestos en el proyecto y su estado o grado de consecución a fecha de realización de este informe:
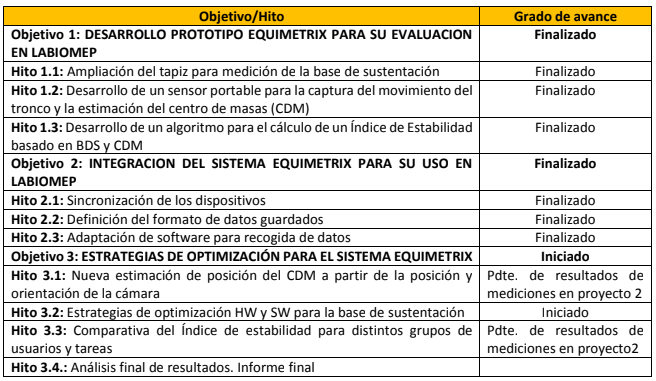
Pasamos a continuación a presentar en mayor detalle los resultados e hitos finalizados a fecha de este informe centrándonos en los Objetivo 1 y 2 del proyecto.
2.1 Objetivo 1: DESARROLLO PROTOTIPO EQUIMETRIX PARA SU EVALUACION EN LABIOMEP
Las personas pueden utilizar distintas estrategias de control postural. Hay al menos 3 estrategias: estrategias de tobillo, estrategia de cadera, o estrategia de paso.
• En el uso de la estrategia del tobillo, la parte superior e inferior del cuerpo se mueven en la misma dirección o en fase entre sí. Debido a que la cantidad de fuerza que puede ser generada por los músculos que rodean la articulación del tobillo es relativamente pequeña, esta estrategia se usa generalmente para controlar el balanceo cuando se está de pie o cuando el rango de movimiento del balanceo es muy pequeño. Esta estrategia del tobillo también se utiliza a nivel subconsciente para restaurar el equilibrio después de un pequeño empuje.
• A diferencia de la estrategia del tobillo, la estrategia de la cadera implica la activación de los músculos más grandes de la cadera. Esta estrategia se utiliza cuando el centro de masa debe moverse más rápidamente hacia atrás sobre la base de apoyo.
• La estrategia final de control postural es la respuesta de paso. Esta estrategia se da cuando el centro de masa se muestra más allá de un límite de estabilidad (por ejemplo, la base de sustentación). El cuerpo, en esta situación, debe buscar una nueva base de sustentación para prevenir una posible caída y dar al menos un paso en la dirección de la pérdida de equilibrio.
El dispositivo EQUIMETRIX se quiere mejorar para que pueda analizar diversas situaciones posturales que desencadenarán estrategias de tobillo, cadera o paso. Es importante poder medir todo el proceso de recuperación, y particularmente en este último caso (respuesta de paso). Del mismo modo, durante las tareas anticipadas que ponen a prueba el mantenimiento del equilibrio, el usuario puede tener que dar algún paso para llegar a una determinada ubicación del centro de masa. Por lo tanto, se necesita un tapiz sensorizado lo suficientemente grande para capturar también la ubicación del pie que se ha movido. En el prototipo inicial esto no era posible.
Con el enfoque del dispositivo EQUIMETRIX (tapiz sensorizado más un sensor portable), evaluar la estabilidad de un paciente que usa esta estrategia de paso requiere un tapiz con un tamaño adecuado con el largo de un paso (véase H1.1).
Hito 1.1: Ampliación del tapiz para medición de la base de sustentación del tamaño actual (0,45x0,3 cm2, ver Figura 2 de la izq.) a uno de mayores dimensiones compuesto por 6 unidades (ver Figura 2dcha.)
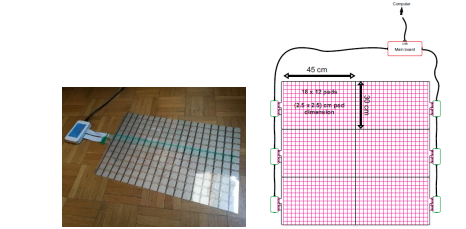
Figura 2 - izq. Un “pad” (0.45x0.3 m) con 216 sensores. Dcha. Diseño del Flexipad compuesto con seis “pads” con un tamaño global de 0.9x0.9 m y 1296 sensores
En el proyecto 1 del programa Baben hemos diseñado y producido los módulos electrónicos que permiten medir los datos de cada de los 6 “pads” (Figura 3). Uno de los módulos electrónicos es el “master”, y es el responsable de agregar todos los datos, formatearlos y mandarlos vía conexión USB a un ordenador principal.
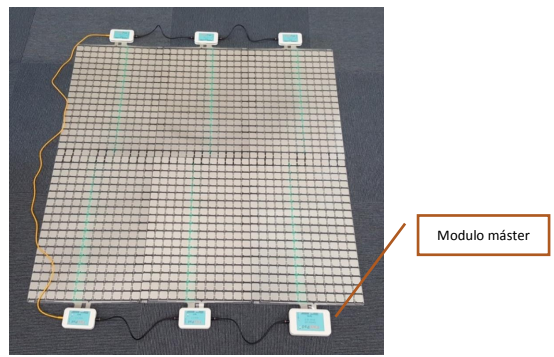
Figura 3 - Primera versión del Flexipad con los 6 pads y 6 módulos electrónicos
Para estar usable en un entorno real, los sensores y módulos electrónicos se han protegido para (1) evitar daños y (2) facilitar su movimiento (ver Figura 4).
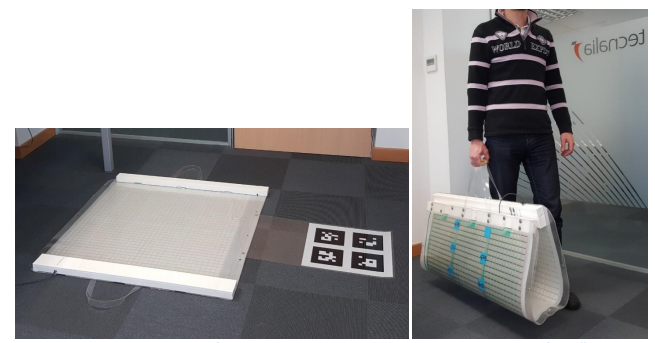
Figura 4 - izq. Primera versión del sistema Flexipad completo. Dcha.El sistema está diseñado para facilitar su manipulación
Esta primera versión del Flexipad ha sido mejorada en varios aspectos:
• Se ha cambiado el diseño electrónico para tener solamente un módulo electrónico centralizado (Figura 5¡Error! No se encuentra el origen de la referencia.). Los seis “pads” están conectados a través de cables planos. De este modo se han podido eliminar las partes de laterales protección.
• Además, y después de varias pruebas, se han podido reemplazar las dos películas de PVC flexibles de 2 mm que protegen la capa sensible de los “pads”, por dos capas de película de PVC flexible de 1 mm. De este modo se consiguió una reducción significativa del peso total.
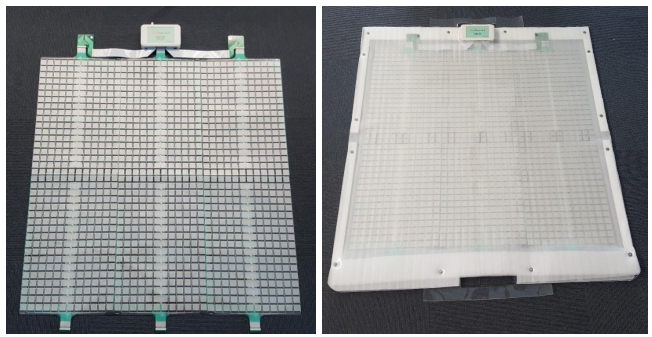
Figura 5 - Nuevo diseño electrónico de Flexipad con un único módulo centralizado.
Al final logramos reducir el peso total del Flexipad de 7,85Kg a 2,60Kg (67% de reducción) ofreciendo una solución ligera y fácil de llevar.
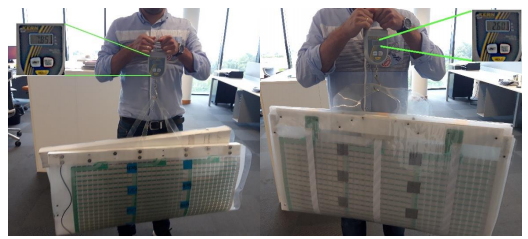
Figura 6 - Izd. Primera versión (7.85Kg). (Dcha) segunda Flexipad versión (2.60Kg)
Hito 1.2: Desarrollo de un sensor portable para la captura del movimiento del tronco y la estimación del centro de masas (CDM).
La persona porta un sistema basado en visión (una cámara) a la altura del tronco. Esta cámara captura la imagen de un marcador visual conocido colocado en el suelo. La posición y orientación de la cámara son estimadas utilizando librerías libres para procesamiento de imágenes (openCV). Se aplica un modelo para estimar el centro de masas de la persona usuaria a partir de la posición y orientación de la cámara.
Para el prototipo se ha seleccionado una cámara USB estándar, aunque la lente ha sido reemplazada para obtener un ángulo de visión superior. La camera saca imágenes sobre un patrón visual situado en el suelo (Figura 7 - ). Es un patrón visual de referencia basado en marcadores ArUco, comentar que se trata de un marcador pasivo, que no necesita de alimentación para su funcionamiento, lo que resulta ser una ventaja frente a otros marcadores que podría ser LED. La generación de este marcador es sencilla, ya que se utiliza una base de datos pública a la que se accede en OpenCV (módulo “Aruco”). Una vez se accede a los mismos, se pueden imprimir en la medida más adecuada para cada aplicación.
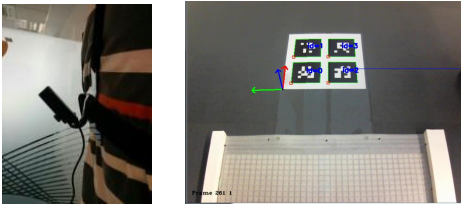
Figura 7 - Sensor óptico colocado en el tronco (izq.) para estimar la posición y orientación del tronco a partir de imágenes del patrón visual (dcha.)
El arnés se utiliza para sujetar y posicionar la cámara a la parte posterior del tronco de una persona. Debido a su facilidad para colocárselo y quitárselo, la capacidad de ajuste a diversos tamaños de tronco y la posibilidad de disponer de un grado de libertad para orientar la cámara de forma óptima se ha optado por utilizar un producto comercial como es el arnés de pecho para la cámara GoPro (Figura 8).

Figura 8 - Arnés para sujeción cámara al tronco
Trabajo en curso: conseguir una transmisión de datos inalámbrica entre el sensor de visión (cámara) y el software del prototipo Equimetrix.
La idea es de remplazar la camera USB por un teléfono móvil (Figura 9). El smartphone se encarga de (1) tomar imágenes del patrón visual, (2) hacer la estimación de la position y orientación del teléfono, y (3) mandar UDP (vía wifi) la posición 3D y orientación del teléfono.
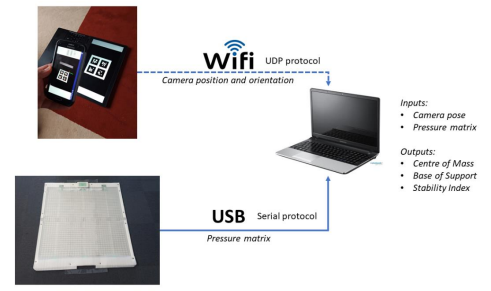
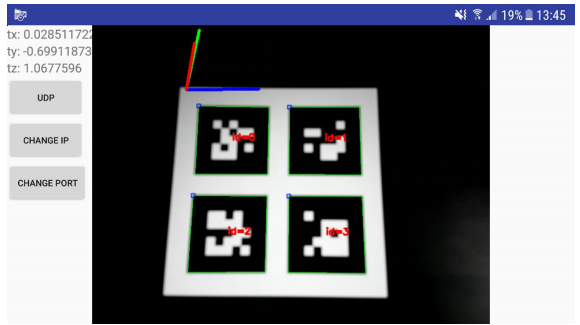
Hemos creado una aplicación móvil Android (Figura 10) que se encarga de :
• crear un cliente UDP,
• estimar la position de la camera a partir del flujo video del patrón visual,
• mandar un mensaje UDP al servido (ordenador)
Hito 1.3: Desarrollo de un algoritmo para el cálculo de un Indice de Stabilidad basado en BDS y CDM. Se asume que la estabilidad postural está asociada con algunos de las siguientes características:
1) el mantenimiento del CDM (o del CDM extendido) sobre la BDS (Hof, Gazendam, and Sinke 2005), 2) o el movimiento y trayectoria suave del CDM y del CDP,
3) o la capacidad de restaurar la posición del CDM o el CDP a una posición óptima.
Otros estudios apoyan la tesis de que conceptos/métodos como “time to contact” que analizan la posición relativa entre el CDM y la posición de los pies (como la BDS) proporcionan mayor información y tienen gran fiabilidad comparados con los métodos tradicionales basados en medidas únicamente del CDM o del CDP. Podemos citar en este sentido las comparativas de:
- Forth (Forth, Metter, and Paloski 2007) realizó una comparación entre:
o EQscore (basado en la posición del CDM) como parámetro más utilizado como estimador de la
estabilidad o Con Time-to-Contact (TTC) que se basa en la posición del CDM y la velocidad relativa a la BDS. De esta comparativa concluyeron que TTC permite una mejor diferenciación entre movimientos que puedan suponer un riesgo para la estabilidad postural.
- (Wheat, Haddad, and Scaife 2012) : Las medidas de TTC fueron generalmente más fiables que las tradicionales medidas de la estabilidad postural, en especial cuando se analizaban menor número de pruebas y con menor duración.
Tomando como base estos estudios, la herramienta de evaluación funcional cuantitativa detectará y cuantificará episodios de inestabilidad en base a la cinemática relativa del CDM-BDS.
El sistema EQUIMETRIX usa el concepto de “time to contact” (CDM-BDS) para cuantificar en tiempo real el estado postural de un sujeto.
2.2 Objetivo 2: INTEGRACION DEL SISTEMA EQUIMETRIX PARA SU USO EN LABIOMEP
Los tres hitos planteados para este objetivo: Hito 2.1: Sincronización de los dispositivos, Hito 2.2: Definición del formato de datos guardados y Hito 2.3: Adaptación de software para recogida de datos; se han desarrollado en varias fases. A continuación, se describen en mayor detalle:
1. Preparación y envío de un pre-prototipo de EQUIMETRIX, no finalizado, y con acceso a un software básico de adquisición de datos. Este pre-prototipo ha permitido a LABIOMEP conocer el sistema y poder definir en detalle el protocolo de recogida de datos. El pre-prototipo enviado se muestra en la Figura 11 y fue enviado a finales de Enero de 2019.
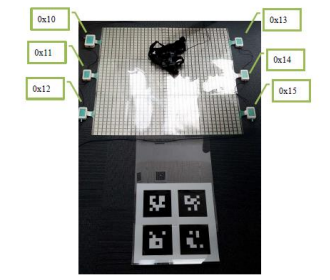
Figura 11 – Pre-prototipo EQUIMETRIX enviado a LABIOMEP.
Tras el envío del pre-prototipo y de forma remota, se realizó una sesión de formación de los investigadores de LABIOMEP sobre la instalación y uso del sistema, y sobre los fundamentos y métodos de cálculo en los que se basa la solución EQUIMETRIX.
2. Soporte y ayuda a la definición del protocolo de mediciones y pruebas a realizar. TECNALIA ha colaborado y contribuido a una definición conjunta del protocolo de mediciones y comparaciones a realizar en el proyecto 2. El detalle de dicho protocolo está recogido en el informe 2 de progreso correspondiente al proyecto 2. Aquí como resultado mostramos en la Figura 12 la estructura de pruebas definida:
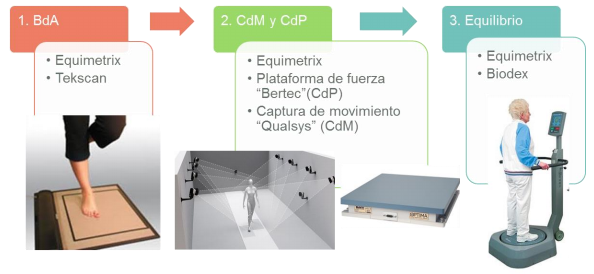
Figura 12 – Pre-prototipo EQUIMETRIX enviado a LABIOMEP.
3. Preparación y envío de un prototipo EQUIMETRIX completo obtenido una vez finalizado el Hito 1.1(Ver Figura 13). Este prototipo fue enviado a LABIOMEP en Abril de 2019, una vez definido el protocolo de las mediciones e incluye la adaptación del software para el registro de los datos.
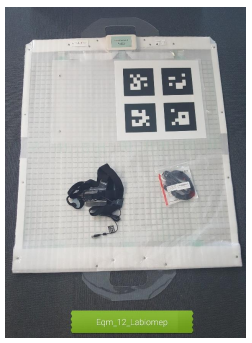
Figura 13 – Prototipo EQUIMETRIX completo enviado a LABIOMEP.
Además, y durante las mediciones realizadas por LABIOMEP hasta la fecha, TECNALIA ha dado soporte resolviendo las dudas y problemas que han surgido en la utilización del prototipo enviado.

